If there is one hobby project that is close to my heart is this Self-balancing robot I designed with one of my student back in the days.

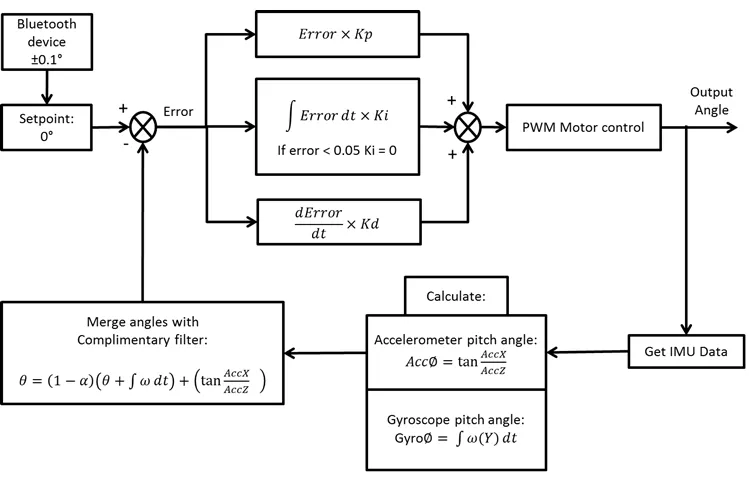
Figuring out the PID control (digital signal processing) was amazing. It was controlled via an Android Bluetooth App. Well, I still have all the design files why not build it again, this time with my daughter.
I have exhibited the robot in many platform and Tech gatherings
I have exhibited the robot in many platform and Tech gatherings

The young kids were the most fascinated by the deign.




The video of the robot
The video of the robot

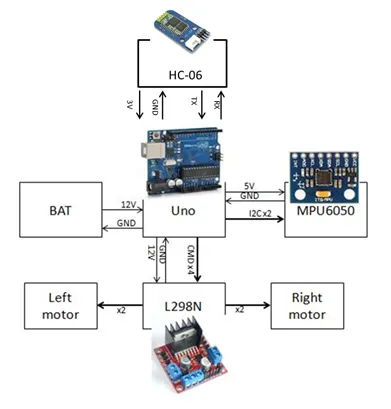
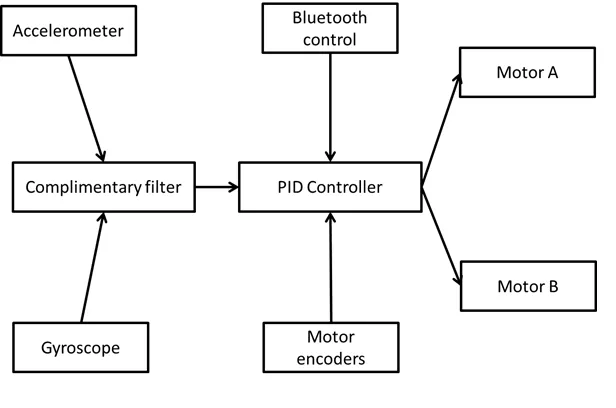
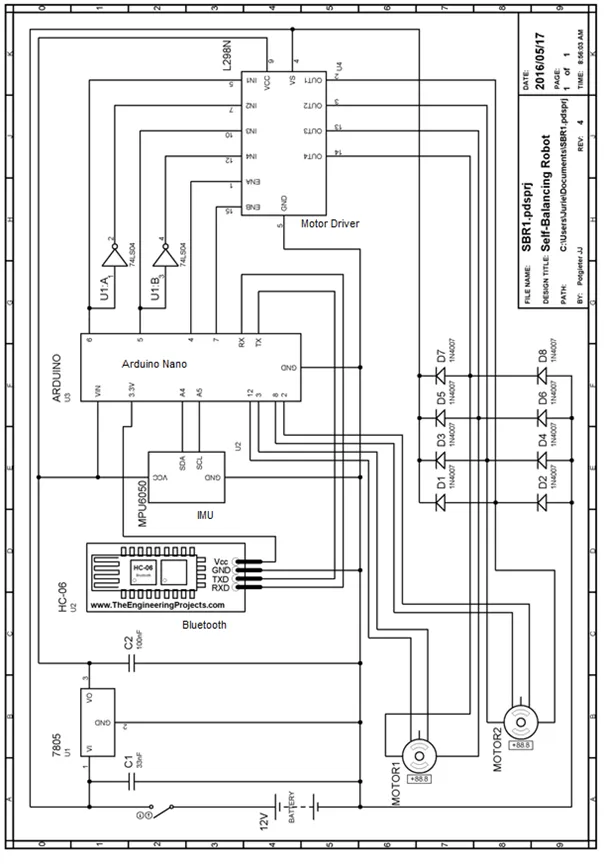
Below are the basics of the design which I will explain after my next design
Below are the basics of the design which I will explain after my next design

NOW THAT I HAVE YOUR ATTENTION, WHO IS KEEN TO REBUILD WITH ME?