Mean Shift 상세
Hill Climb 탐색 방법
. Mean Shift
. gradient descent search
. blind search
. greedy search
1. 정의
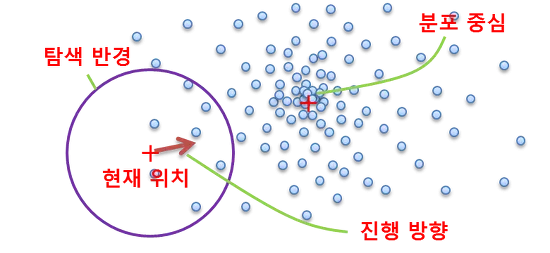
사용자가 설정한 ROI 데이터(특징점,코너,색상) 밀도 분포의 peak 또는 무게중심을 찾아 간다.
단계
- 현재 위치에서 반경 r 이내에 들어오는 데이터들을 구한다: (x1,y1), (x2,y2), ..., (xn,yn)
- 이들의 무게중심의 좌표 (∑xi/n, ∑yi/n)로 현재 위치를 이동시킨다.
- 1~2 과정을 위치변화가 거의 없을 때까지, 즉 수렴할 때까지 반복한다.
기본 아이디어 (eg. 색상 히스토그램 이용시 :ROI중심으로 일정 거리 내에서(탐색 윈도우) 가장 비슷한 히스토그램을 쫒아다니는 방식으로 물체를 추적한다.)
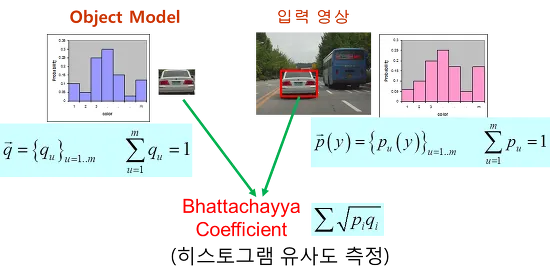
추적하고자 하는 대상 물체에 대한 색상 히스토그램(histogram)과 현재 입력 영상의 히스토그램을 비교해서 가장 유사한 히스토그램을 갖는 윈도우 영역을 찾는 것이다.
- 단점 : 모든 가능한 윈도우 위치에 대해 각각 히스토그램을 구하고 또 비교해야 하기 때문에 시간이 너무 오래 걸린다.
개선 방안
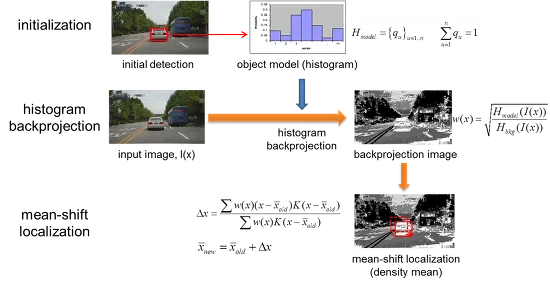
histogram backprojection 기법과 mean shift를 결합한 방법
- 먼저, 영상에서 추적할 대상 영역이 정해지면 해당 윈도우 영역에 대해 히스토그램을 구하여 객체 모델로 저장한다.
- 이후 입력 영상이 들어오면 histogram backprojection을 이용해서 입력 영상의 픽셀값들을 확률값으로 변경시킨다.
- 이렇게 구한 확률값 분포에 대해 mean shift를 적용하여 물체의 위치를 찾는다.
- 만일 물체의 크기 변화까지 따라가고 싶은 경우에는 찾아진 위치에서 윈도우의 크기를 조절해 가면서 저장된 모델과 가장 히스토그램 유사도가 큰 스케일(scale)을 선택한다.
3. 절차
4. 문제점
- 탐색윈도우가 작을 때는 Local minimum 에 빠져서 더 이상 추적이 불가능하다.
- 영상속의 물체가 커지거나 작아져도 ROI 크기가 일정하다.
- 색상히스토그램을 사용하는 경우 조도변화나 잡음이 많은 환경에서는 성능이 좋지 않다.
위 그림처럼 Local Minimum에 빠진다.
CAM(Continuously Adaptive Mean) shift 상세
특징 : Mean shift의 문제점 중 ROI크기가 일정하다는 문제점을 해결하여 ROI크기가 매번 바뀔 수 있고,회전변화에도 추적이 가능하다.
- 탐색윈도우의 크기를 스스로 조정하는 기법을 사용하여 Mean-shift의 답점을 보강한다.
검출된 객체의 영역의 Hue 값의 분포를 이용하여 변화될 위치를 예측하고 탐지한 후 중심을 찾아 객체를 추적하게 된다.
- 상대적으로 Hue 값을 사용하면 조명의 영향에 덜 민감하므로 Hue값을 사용한다
단점 : 조도변화, 잡음이 많은 배경에서는 성능이 좋지않은 특징
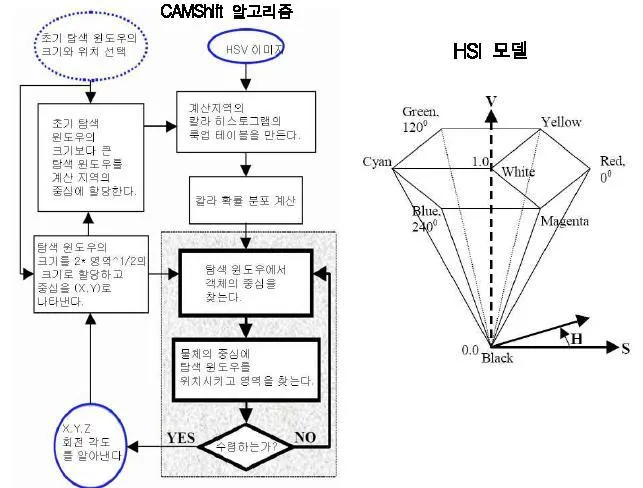
단계
- 관심영역(ROI)이 주어지면 HSV 색 모델의 Hue값으로 변환한다.
- ROI에서 1차원 histogram을 구축하여 저장하고 추적 모델로 사용한다.
- ?
OpenCV의 MeanShift / CamShift 추적기: C++코드
비디오에서 객체 추적하기1 - Meanshift 살펴보기 : python
비디오에서 객체 추적하기2 - CamShift: python